Lyft 车辆轨迹预测数据集及基线模型
Level 5在6月25号公布了一个新的车辆轨迹预测数据集,相比于前段时间的包含320h数据的Argoverse,该数据集有1110h,并且其API也更容易使用,包含了完善的高清地图栅格化功能,从而可以较为容易地用CNN实现车辆轨迹预测。
Level 5 车辆轨迹预测数据集
具体来说,Level 5 提供的数据集包含了以下几个部分:
- 17万个场景,每个场景大约是25秒的长度(大约1118小时)
- 1.6万英里的数据,由23个自动驾驶车辆收集
- 相关区域的高精地图,包括了道路结构、卫星地图、交通灯,人行横道等
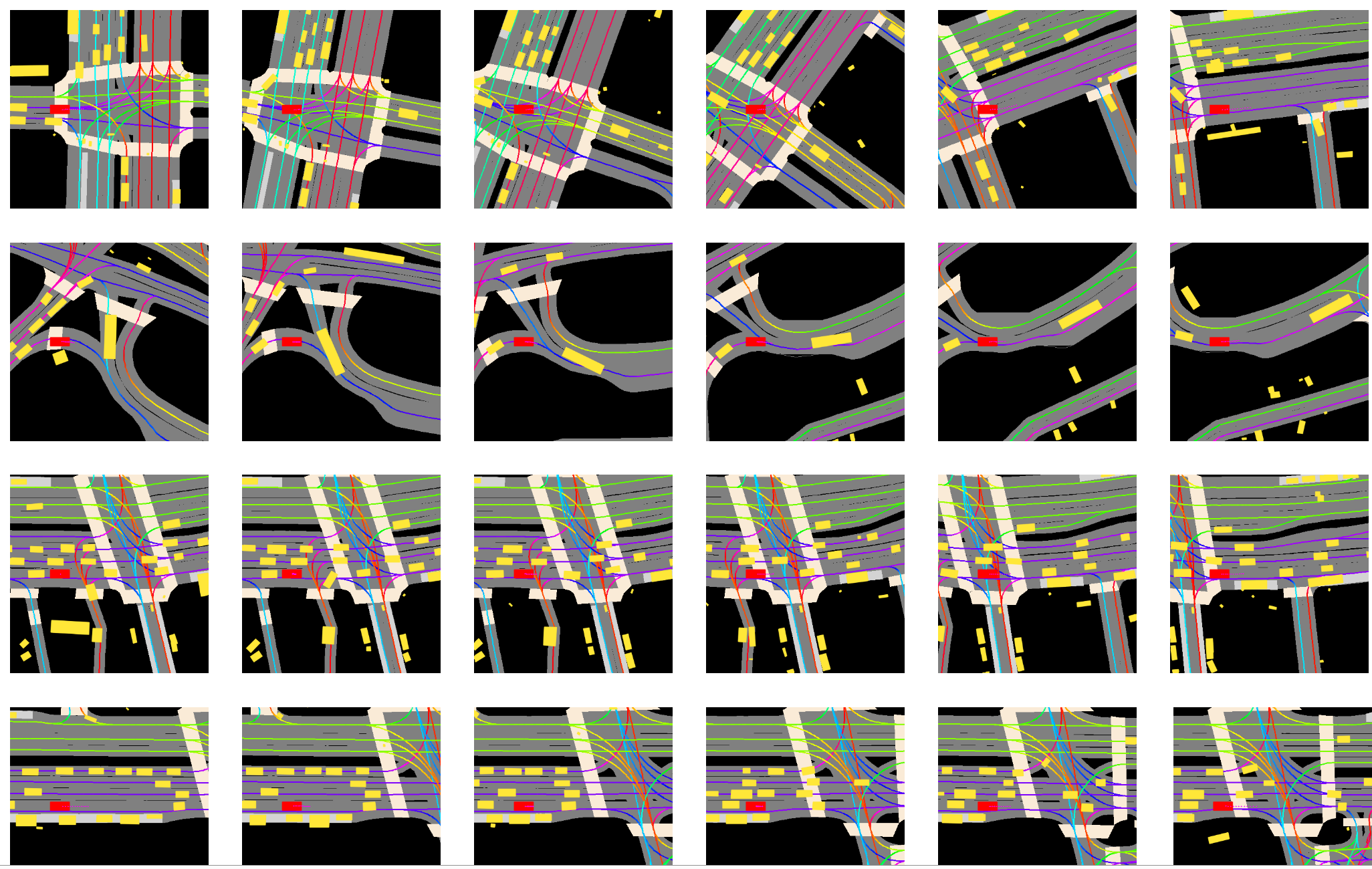
下图可视化 展示了17万个场景中的一部分,可以发现场景还是很丰富的:
另外,Level 5 预期将于2020年8月在kaggle上进行公开竞赛,也会进一步提高该领域的关注度,不过具体的要求还没有公布。
ResNet 基线模型
Level 5还提供了一个完整的ResNet基线模型训练流程,并在论文中给出了相应的结果,其使用1s的过去车辆轨迹预测未来5s的ADE是2.28m,和当前的SOAT结果1.74m (预测单个轨迹)相差其实不大。考虑到该方法在实现上十分简单,在工程上还是有一定优势的。

Level 5使用在ImageNet预训练的ResNet53作为backbone,然后替换掉了该模型的输入和输出,输入为N帧的过去车辆轨迹栅格化图像,单个图像的shape为 (W, H, 3),N个图像在第三个维度垒起来,因此输入的shape实际为(W, H, 3 * N),然后模型的最后一层被替换成了全连接层,输出的是(X * 10 * 2)维的向量,表示预测车辆的未来X秒轨迹。