Argoverse 数据集详解
Argoverse数据集介绍
数据集
Argoverse1的数据集包括3D Tracing以及Motion Forecasting这两大类,我们关注的是Argoverse的Motion Forecasting这个数据集,包含了从超过1000个驾驶小时的数据中提取的327,790条有价值的场景,每个场景包含了自动驾驶车辆5秒钟的行驶轨迹,同时跟踪所有其他参与者(例如汽车,行人)。 并将它们分为208272个训练序列,40127个验证序列和79391个测试序列。
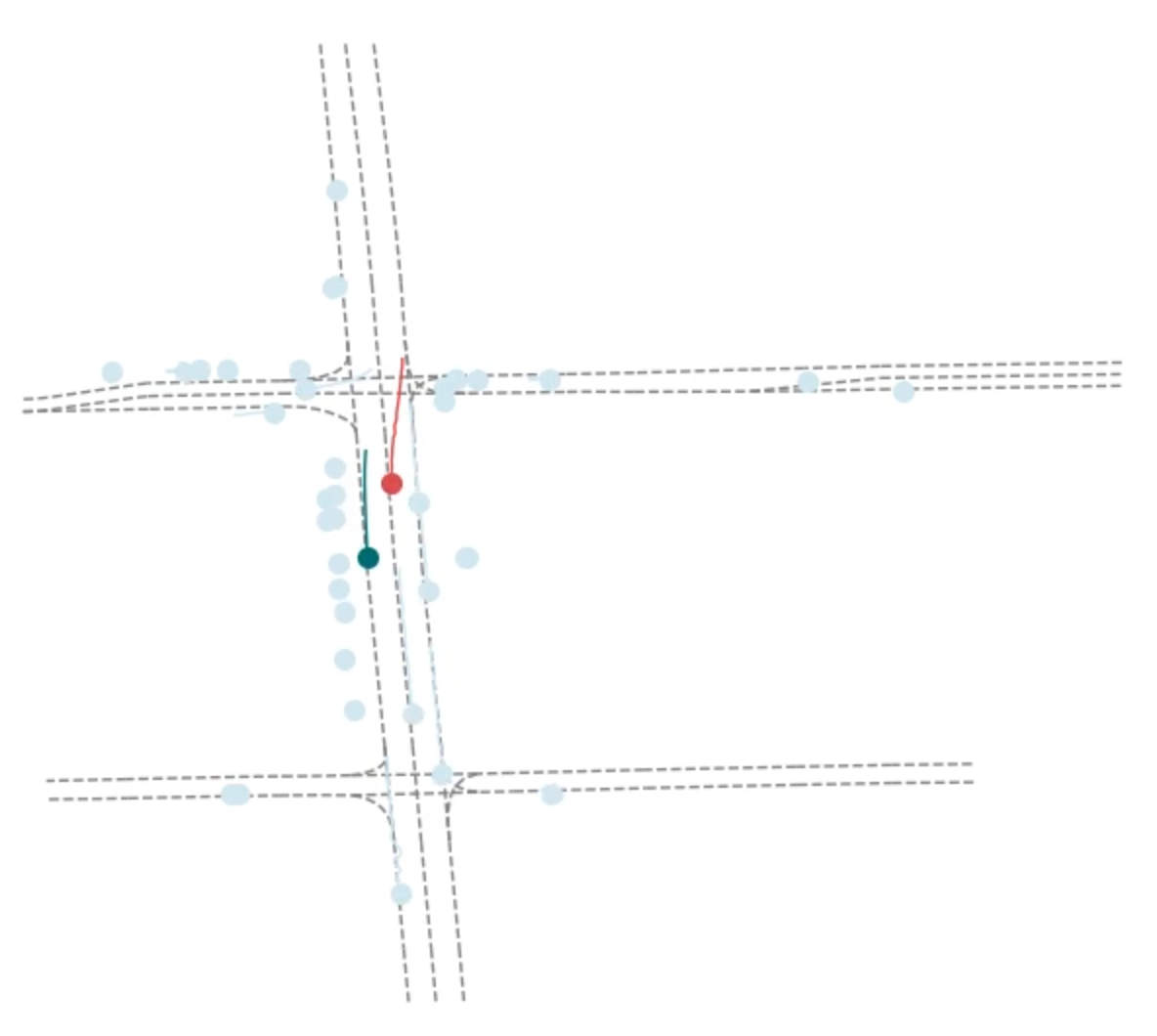
这里每个场景都包含以10 Hz采样的所有跟踪对象的2D鸟瞰图。如下图所示,这是某一个场景的静态图示,绿色的是自动驾驶车辆,红色的是某一个被跟踪的车辆,淡蓝色的点是其他被跟踪车辆。
地图
除了车辆轨迹数据集,Argoverse还给出了行驶地区的高精地图,分为三个部分:
Vector Map: Lane-Level Geometry
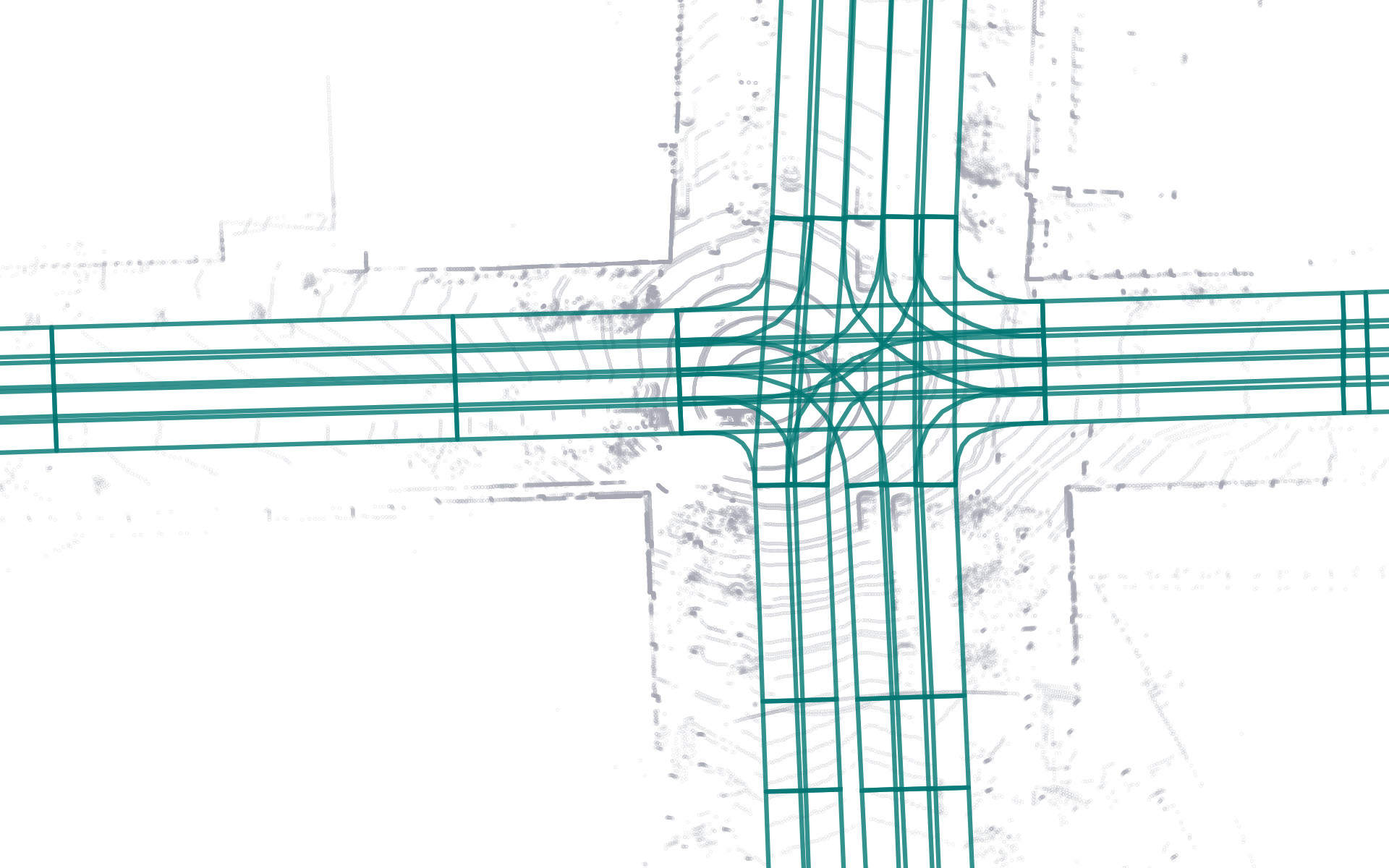
如图所示,给出了环境中车道级别的精确信息。
Rasterized Map: Drivable Area
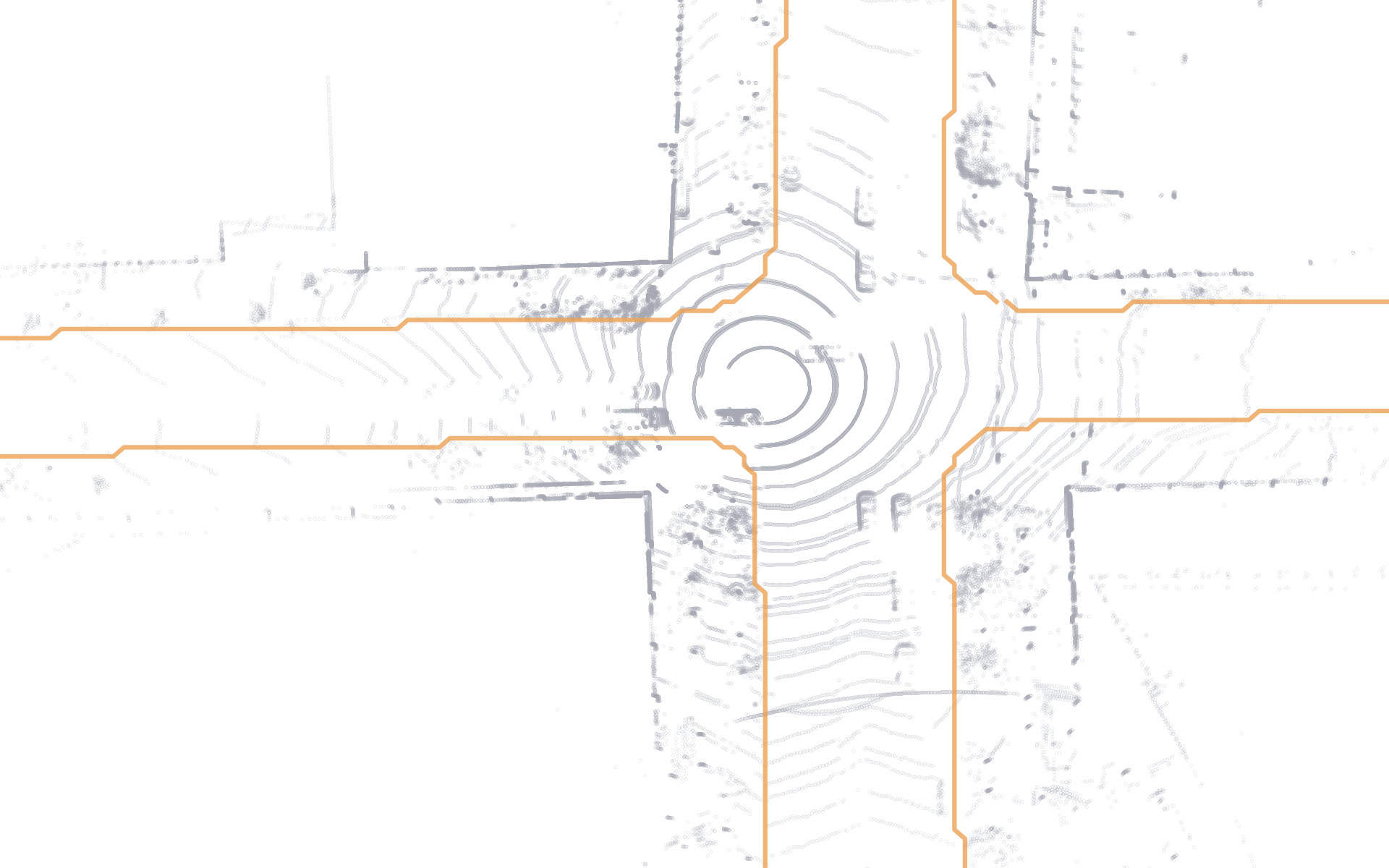
同时给出了一米精度的可驾驶区域binary map。
Rasterized Map: Ground Height
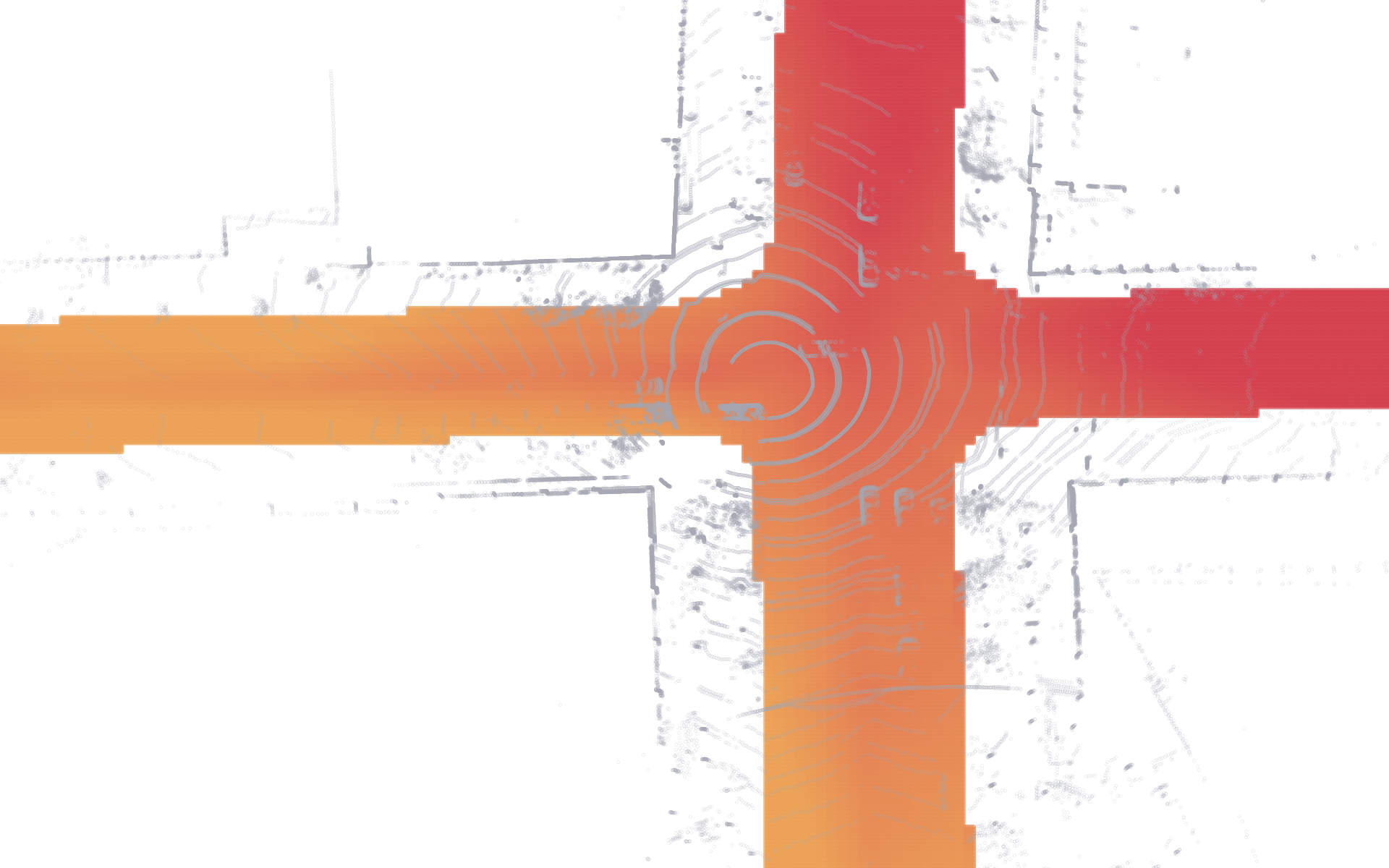
另外也给出了这些区域的高度图。
竞赛
输入输出
Argoverse预测竞赛是给定待预测车辆的20帧(2s)过去信息,预测这些车辆的未来30帧(3s)信息,因为Argoverse认为对于车辆来说,5s已经足够捕获到车辆轨迹信息最关键的部分了(如换道或者通过交叉口),另外,预测任务可以使用social context以及map information。
评估指标
预测的指标主要是minimum Average Displacement Error(minADE)以及minimum Final Displacement Error(minFDE)over K predictions,其中K = 1, 3, 6,9。值得注意的细节是minADE是指具有minFDE的预测轨迹的ADE。
另外,考虑到minADE和minFDE只能评估最好的一个轨迹,例如如果一个预测器给出了1个最好的轨迹和4个很差的轨迹,那么它就会优于给出5个很好的轨迹的预测器。所以Argoverse还采用了另外两个评测指标,一个是Drivable Area Compliance (DAC),即如果一个预测器给出m个轨迹,而其中n条在某个时刻离开了可驾驶地区,那么DAC就等于 (n - m) / n。还有一个是Miss Rate (MR),和DAC类似考察的是多数轨迹的优劣,如果m条轨迹中n条的FDE大于2m,那么MR就等于m/n。
总的来说,我们想要minADE、minFDE、MR越小越好,DAC越大越好。
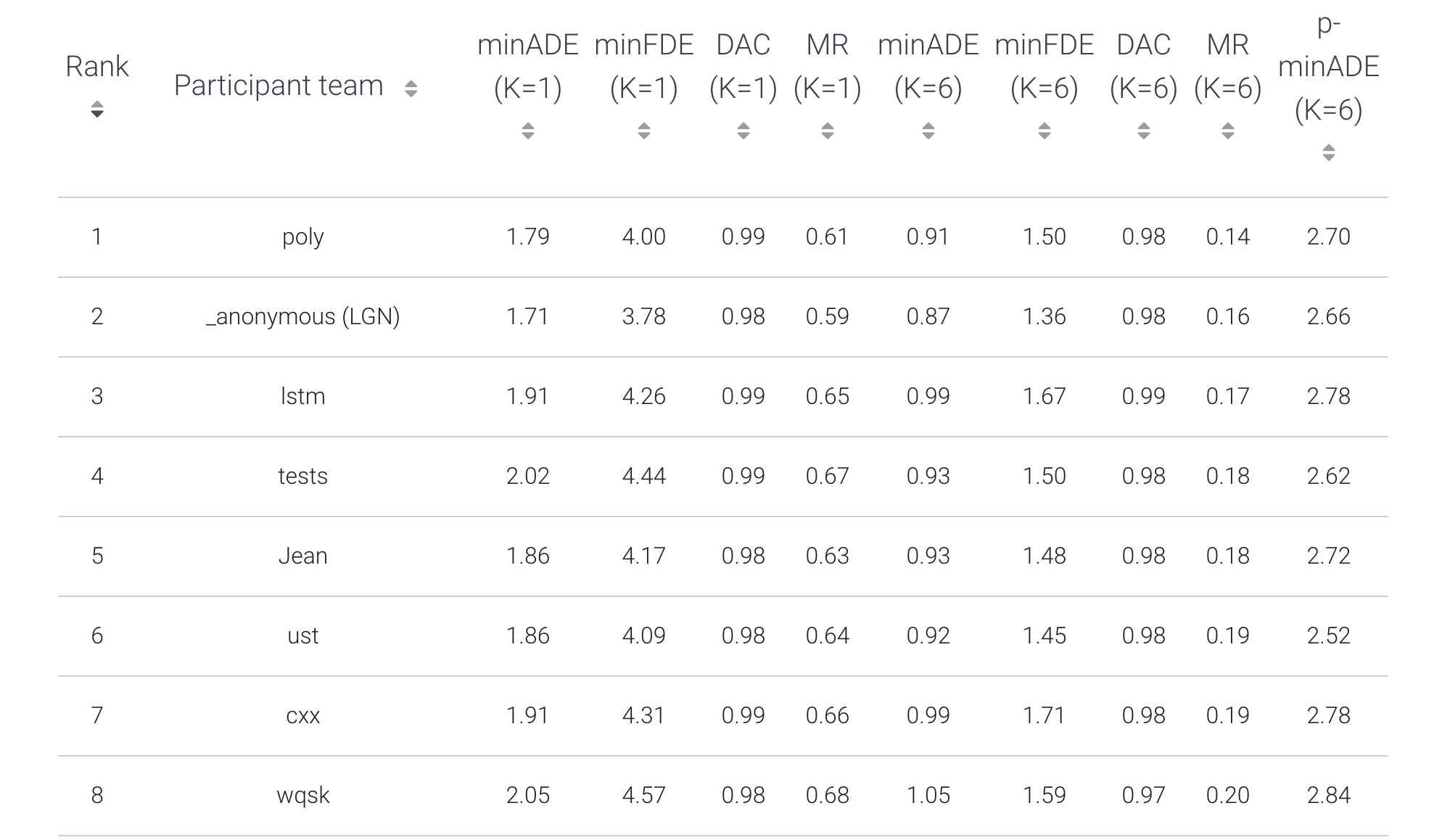
下图是来自于最新Argoverse Motion Forecasting竞赛的结果, 可以看到在预测单一轨迹的时候,最好的方法给出的minADE是2m左右,minFDE是4m左右。而在预测6条轨迹的时候,minADE为0.9m,minFDE为1.5m。
另外这里相对于原论文还多了Probabilistic minimum Average Displacement Error (p-minADE),这个是optional的,如果模型给出了每条轨迹的概率的话就可以用这个来计算。
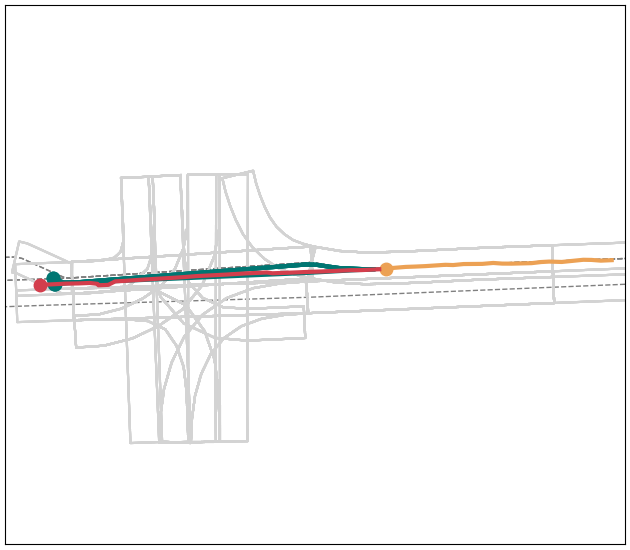
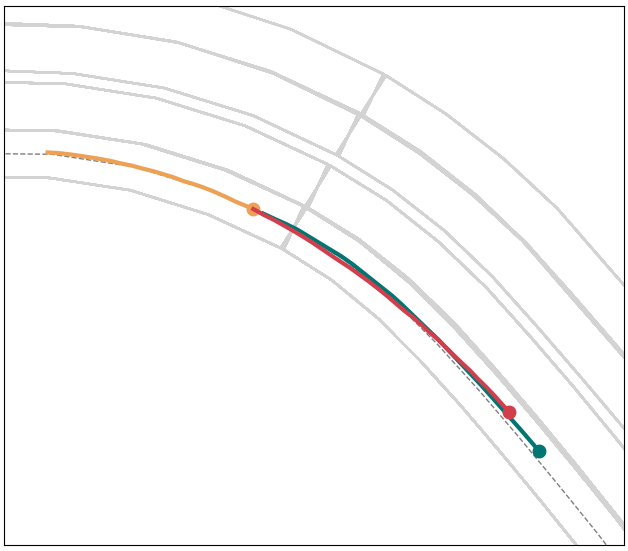
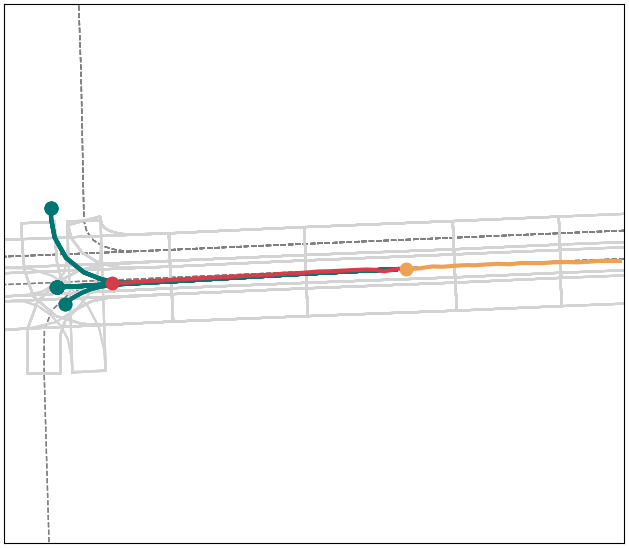
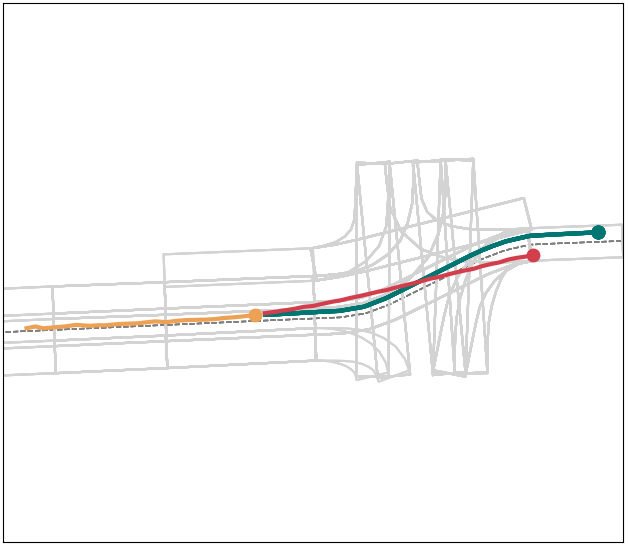
下面几个图是Argoverse竞赛输入输出的例子,橙色的轨迹代表某个跟踪车辆在最初2秒钟内的运动,绿色的轨迹代表我们的前k个预测轨迹,红色的轨迹代表的是真实轨迹。
参考链接
-
https://www.argoverse.org/data.html ↩